Error 404: Not Found

Oeps! En toen was je ineens waar je niet wezen wilde!
Maak je keuze in het menu om vrolijk verder te gaan op deze website.
Excuses voor het ongemak!
Maak je keuze in het menu om vrolijk verder te gaan op deze website.
Excuses voor het ongemak!
 De integraal van
De integraal van De integraal van
De integraal van De integraal van
De integraal van De integraal van
De integraal van De integralen van
De integralen van Vectoren, vraagstuk 17
Vectoren, vraagstuk 17 Vectoren, vraagstuk 55
Vectoren, vraagstuk 55 Vectoren, vraagstuk 93
Vectoren, vraagstuk 93 Tabel met Taylor-reeksen
Tabel met Taylor-reeksen De Taylor-reeks van
De Taylor-reeks van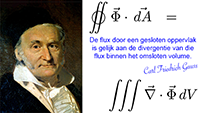 De stelling van Gauss
De stelling van Gauss Relativiteitstheorie basic
Relativiteitstheorie basic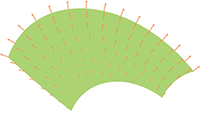 Uitleg artikel algemene relativiteitstheorie: paragraaf 15
Uitleg artikel algemene relativiteitstheorie: paragraaf 15 De transformatievergelijking voor de energie van EM-golven
De transformatievergelijking voor de energie van EM-golven De race tegen de lichtstraal
De race tegen de lichtstraal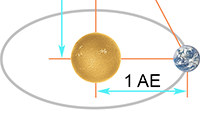 Een lichtjaar omrekenen naar parsecs en vice versa
Een lichtjaar omrekenen naar parsecs en vice versa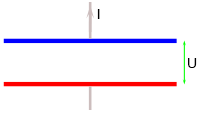 De energie in een condensator
De energie in een condensator De illusie dat ik morgen nog gezond ben
De illusie dat ik morgen nog gezond ben Reizigers naar de werkelijkheid
Reizigers naar de werkelijkheid Beperkingen
Beperkingen De Natuur spreekt: Ice/IJs
De Natuur spreekt: Ice/IJs Natuurkundeclub Gℏc
Natuurkundeclub Gℏc LaTeX: astronomische symbolen
LaTeX: astronomische symbolen Kalender van de jaren 0141 − 0150 met weekdagen
Kalender van de jaren 0141 − 0150 met weekdagen Voorbeelden van E = mc2
Voorbeelden van E = mc2 De pijn die je voelt wanneer je in een zwart gat valt
De pijn die je voelt wanneer je in een zwart gat valt De versnelling van een baksteen die in een zwart gat valt
De versnelling van een baksteen die in een zwart gat valt De snelheid van een baksteen die in een zwart gat valt
De snelheid van een baksteen die in een zwart gat valt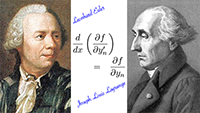 De Euler-Lagrange-vergelijking
De Euler-Lagrange-vergelijking De baan van een baksteen bij een zwart gat
De baan van een baksteen bij een zwart gat De Taylor-reeks van f (x) = tan (ax)
De Taylor-reeks van f (x) = tan (ax) De integralen van f (x) = sin2 x/(1 + a cos x)2
De integralen van f (x) = sin2 x/(1 + a cos x)2 De integraal van f (x) = 1/(x2 (ax2 + bx + c))
De integraal van f (x) = 1/(x2 (ax2 + bx + c)) De invaltijd van een baksteen die in een zwart gat valt
De invaltijd van een baksteen die in een zwart gat valt Naar de overzichtspagina wiskunde
Naar de overzichtspagina wiskunde Naar de overzichtspagina natuurkunde
Naar de overzichtspagina natuurkunde Naar de overzichtspagina filosofie
Naar de overzichtspagina filosofie Doneer enkele euro’s
Doneer enkele euro’s Wetenschappelijke boeken te koop
Wetenschappelijke boeken te koop Lezingen
Lezingen