Lorentz-transformaties zonder invariantie van de lichtsnelheid
Leid de Lorentz-transformaties af zonder gebruik te maken van de invariantie van de lichtsnelheid.
De lichtsnelheid is invariant en dat betekent dat licht door iedere waarnemer met dezelfde snelheid
wordt waargenomen.
Deze snelheid duiden we aan met c.
Vanuit dit gegeven is het vervolgens een redelijk simpel wiskundig pad dat naar de
Lorentz-transformaties
leidt.
Wat op z’n zachtst gezegd opmerkelijk is, is dat de
Lorentz-transformaties
ook af te leiden zijn zonder gebruik te maken van de invariantie van de lichtsnelheid.
Newton zou ze afgeleid kunnen hebben (of een andere slimmerik die voor Einstein leefde) en daarmee de
onjuistheid van Newton’s statement over absolute tijd en
absolute ruimte
hebben kunnen ontkrachten.
Maar goed, zo is het niet gelopen.
Pas nadat Einstein de speciale relativiteitstheorie voor het voetlicht had gebracht (in 1905) was het
Vladimir Ignatovski die vijf jaar later als eerste de
Lorentz-transformaties
afleidde zonder lichtinvariantie.
In nagenoeg alle literatuur over relativiteitstheorie wordt dit bijzondere aspect volledig genegeerd,
dus de hoogste tijd om er hier een pagina aan te wijden.
Dit wordt natuurkunde op het scherpst van de snede en op de rand van de filosofie.
Nou, daar gaan we dan.
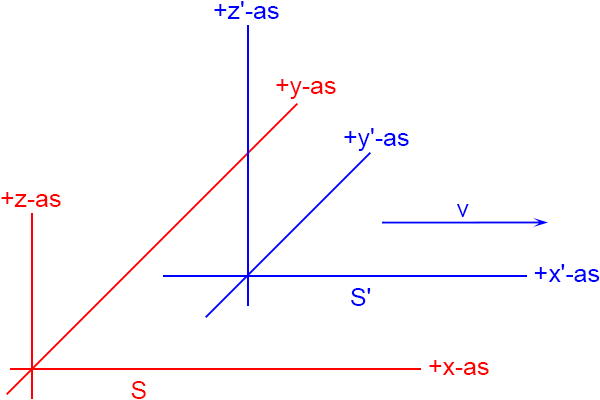
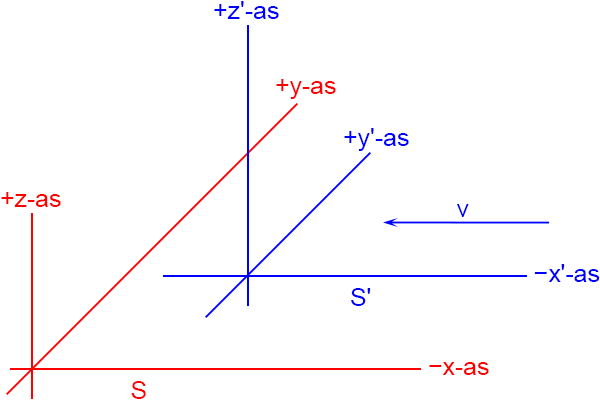
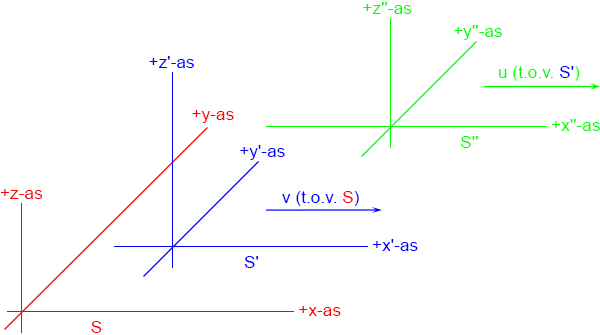
Stel ik heb twee stelsels, S en S’, en het S’-stelsel beweegt met een snelheid v ten opzichte van
het stelsel S.
Op de een of andere manier kan ik de ruimtetijdcoördinaten in het S’-stelsel berekenen middels
bepaalde transformatievergelijkingen.
Of anders gezegd, de ruimtetijdcoördinaten in het S’-stelsel zijn functies van de
ruimtetijdcoördinaten t, x, y en z in het S-stelsel plus de snelheid v:
Ik heb op dit moment nog geen idee hoe deze vier functies eruit zien, ik weet alleen dat ze moeten
bestaan.
Waarom moeten ze bestaan?
Omdat er een eenduidige relatie moet bestaan tussen beide stelsels, want alles wat er in het ene stelsel
gebeurt vindt onvermijdelijk ook plaats in het andere stelsel.
Het zijn geen gescheiden werelden, valt er een ei kapot in het ene stelsel dan doet ie dat gegarandeerd
ook in het andere stelsel.
Ik stel:
- de snelheid v is in de x-richting,
- de snelheid v is in de x’-richting.
De coördinaten x, y en z zijn puur wiskundige abstracties en de bijbehorende assen kan ik neerleggen
zoals ik wil.
Voor het gemak (van wat komen gaat) leg ik in beide stelsels de x-as in de richting van de snelheid.
Vervolgens leg ik een staaf op de x-as in het S-stelsel.
Het ene uiteinde ligt op x-coördinaat x
1 en het andere uiteinde op x-coördinaat x
2
(x
1 < x
2).
De bijbehorende x-coördinaten in het S’-stelsel zijn:
De lengte van de staaf is, uitgedrukt in de coördinaten van het S-stelsel:
Ik kan de lengte van de staaf ook uitdrukken in de coördinaten van het S’-stelsel.
Dit wil
niet zeggen dat een waarnemer in het S’-stelsel het verschil van die twee coördinaten ook
werkelijk kan en/of moet duiden als de lengte van de staaf.
Het gaat puur en alleen om een uitdrukking in de coördinaten van het S’-stelsel voor de lengte van de
staaf zoals ik die in de vorige vergelijking heb opgeschreven voor het S-stelsel:
Vervolgens leg ik de staaf een eindje verderop en dat eindje noem ik ∆x.
Ik ga ervanuit dat het verleggen van de staaf geen invloed heeft op de lengte van de staaf.
Dat klinkt op zich logisch (en noodzakelijk, want anders kan ik geen natuurkunde bedrijven), maar toch
dien ik deze aanname te formaliseren want het is immers een aanname:
- ruimte is homogeen (de ruimte ‘hier’ is niet anders dan de ruimte ‘daar’).
Ik schrijf wederom de lengte van de staaf op, uitgedrukt in de coördinaten van beide stelsels:
Ik stel de vergelijkingen (3b) en (4b) aan elkaar gelijk:
Ik deel beide zijden door ∆x:
Vervolgens neem ik de limiet voor ∆x gaat naar nul, of anders gezegd, ∆x wordt infinitesimaal
klein:
Wat ik hier heb staan zijn twee
afgeleiden, links in het punt
x = x
1 en rechts in het punt x = x
2:
Ik heb x
1 en x
2 volledig willekeurig gekozen en dat impliceert dat de
afgeleide
van f
x naar x altijd (voor iedere x) hetzelfde resultaat oplevert, oftewel een constante
moet zijn.
Het directe gevolg daarvan is dat f
x een lineaire (eerstegraads) functie van x moet zijn.
Door in het voorgaande x, y en z cyclisch te verwisselen of met meerdere staven te werken volgt
daaruit dezelfde conclusie voor f
y en f
z en tevens dat het lineaire functies
van y en z moeten zijn.
Wat ik ook aanneem is dat gewoon even een tijdje wachten eveneens geen invloed heeft op de lengte van
de staaf (en ook dit is wederom noodzakelijk, want anders kan ik geen natuurkunde bedrijven).
Ook deze aanname dien ik te formaliseren:
- tijd is homogeen (de tijd ‘nu’ is niet anders dan de tijd ‘straks’).
Op dezelfde manier zoals ik dat hiervoor heb gedaan met het ruimtelijk verplaatsen van de staaf kan ik
dat ook doen voor twee willekeurige tijdstippen.
Daaruit volgt dan dat de
afgeleide
van iedere functie f naar de tijd een constante moet zijn en dat iedere functie f een lineaire functie
van t moet zijn.
De transformatievergelijkingen (1) zijn dus lineaire vergelijkingen:
Een zeer belangrijk ondersteunend argument waarom de bovenstaande vergelijkingen lineair zijn is de
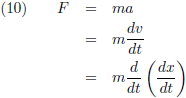
eerste wet van Newton:
- een voorwerp waar geen krachten op worden uitgeoefend is in rust of beweegt zich met constante snelheid
langs een rechte lijn.
Als de vergelijkingen (9) geen lineaire vergelijkingen zouden zijn dan zou een voorwerp in het ene stelsel
langs een rechte lijn bewegen en in het andere stelsel niet terwijl de stelsels onderling met een
constante snelheid bewegen.
Met andere woorden, in het ene stelsel wordt er geen kracht uitgeoefend op het voorwerp en in het andere
stelsel wel.
Tenzij natuurlijk de eerste wet van Newton niet deugt.
Deze optie wil ik uiteraard niet uitsluiten, want het zou zeker niet de eerste keer zijn dat er in de
natuurkunde een overtuiging bij het grof vuil gezet moet worden waar men al eeuwen twijfelloos over was,
maar vooralsnog is er tot op heden geen enkele reden om aan te nemen dat de eerste wet van Newton niet de
werkelijkheid beschrijft en aanpassing behoeft.
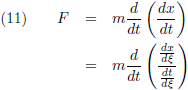
Daarnaast is het wel zo dat alleen de eerste wet van Newton als basis onvoldoende is.
Ik schrijf Newton’s eerste wet even uit in formulevorm (in alleen de x-richting):
Stel nou dat zowel ruimte als tijd dezelfde afhankelijkheid hebben van een onbekende andere parameter:
In dit geval blijft de eerste wet van Newton overeind terwijl het voorgaande betoog in duigen valt.
Dus de homogeniteit van zowel ruimte als tijd is een noodzakelijke aanname om tot de
Lorentz-transformaties
te komen.
Tot zover dit intermezzo over Newton’s eerste wet.
Ik stel dat de oorsprongen van beide stelsels op t = 0 samenvallen, want dan ben ik in één klap die
constanten b
1, b
2, b
3 en b
4 kwijt (die zijn dan nul):
Dit kan ik uiteraard heel compact opschrijven in matrixnotatie:
Tot nu toe speelden al mijn overpeinzingen zich af op de x-as en dat ga ik zo houden.
Op de x-as zijn y = 0 en z = 0, en omdat de x-as en de x’-as samenvallen geldt daar ook dat y’ = 0 en z’ = 0.
Hiermee worden de vergelijkingen (12):
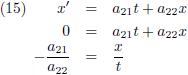
Ik neem eens even plaats in de oorsprong van het S’-stelsel, daar geldt uiteraard altijd dat x’ = 0.
Vergelijking (14b) wordt dan:
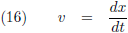
Helemaal aan het begin stelde ik dat het S’-stelsel beweegt met een snelheid v ten opzichte van S-stelsel.
Voor deze snelheid v geldt (omdat ik ook al had gesteld dat de snelheid in de x-richting is):
En omdat de snelheid v constant is én ik ook al heb aangenomen dat ruimte en tijd homogeen zijn én dat de
oorsprongen op t = 0 samenvallen mag ik ook schrijven:
Dit vul ik in in vergelijking (15):
Oftewel:
Hiermee worden de vergelijkingen (14):
Ik stelde dat het S’-stelsel beweegt met een snelheid v ten opzichte van het S-stelsel, maar ik
heb helemaal niets gezegd over de richting van die snelheid.
Ik liet de richting van de snelheid wel samenvallen met de beide x-assen, maar of de snelheid
in de +x-richting of in de −x-richting is liet ik in het midden.
De volgende stap is om de snelheid precies 180 graden om te draaien en ik doe precies hetzelfde
met de x-as en de x’-as.
Op die manier behoudt de snelheid hetzelfde teken en dezelfde relatie tot de beide assen, ik hoef
alleen in de vergelijkingen (20) x en x’ een tekenwisseling te laten ondergaan.
Om een en ander uit elkaar te houden geef ik eerst in de vergelijkingen (20) de variabelen
a
ij een +-index mee:
En nu krijgt iedere x een minteken mee en de +-indices worden −-indices:
En mag dit allemaal zomaar, assen en snelheid omkeren?
Ik heb weer een aanname gedaan, namelijk dat de ruimte geen richtingsgevoeligheid kent:
- ruimte is isotroop (de ruimte is in alle richtingen hetzelfde).
Maar ik had toch al aangenomen dat ruimte homogeen is, waarom dan nog deze aanvullende conditie?
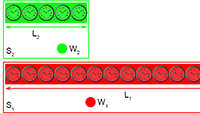
Stel ik heb een gebied waar het overal precies even hard waait en overal in exact dezelfde richting.
Dit windveld is onmiskenbaar homogeen, want op ieder punt heeft de wind dezelfde eigenschappen.
De snelheid van de wind is overal gelijk en ook de richting van de wind.
Maar isotroop is dit windveld zeker niet en dat merk ik direct wanneer ik in dat veld vanaf een
bepaald punt ga bewegen.
Afhankelijk van de richting die ik kies kan ik de wind mee hebben of pal tegen of iedere andere
tussenliggende mogelijkheid.
Met de aanname dat ruimte isotroop is nemen we aan dat ruimte niet een bepaalde richtingsafhankelijkheid
kent (in tegenstelling tot de wind in het plaatje hierboven).
Tenslotte heb ik nog één aanname nodig, het relativiteitsprincipe:
- de transformaties van S naar S’ zijn van dezelfde vorm als de transformaties van S’ naar S.
Of anders gezegd: wanneer ik transformaties uitvoer van S naar S’ en vervolgens terugtransformeer
van S’ naar S dan moet ik weer op mijn oorspronkelijke coördinaten uitkomen.
Of wiskundiger gezegd: de
transformatiematrix
maal de inverse
transformatiematrix
is de
eenheidsmatrix.
Deze laatste zin ziet er in formulevorm uit als volgt:
De
transformatiematrix
kan ik aflezen uit de vergelijkingen (21):
En de inverse
transformatiematrix
kan ik aflezen uit de vergelijkingen (22):
Het product van beide moet de
eenheidsmatrix
opleveren:
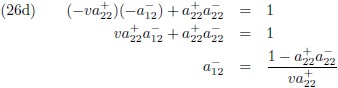
Dit resulteert in de volgende vier vergelijkingen:
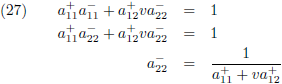
Vervolgens substitueer ik (26c) in (26a):
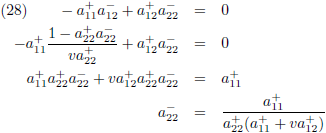
En (26d) in (26b):
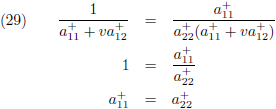
Ik stel de vergelijkingen (27) en (28) aan elkaar gelijk:
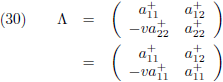
Zodat de
transformatiematrix
(vergelijking (24a)) weer een variabele armer wordt:
De vergelijkingen (22) verschaffen mij de belangrijke informatie dat de
elementen
van de
transformatiematrix
die op de
hoofddiagonaal
liggen gelijk zijn voor de
transformatiematrix
en zijn inverse:
En de
elementen
die op de
nevendiagonaal
liggen ondergaan een tekenwisseling:
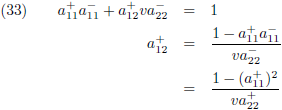
Met deze kennis kan ik vergelijking (26a) omschrijven als volgt:
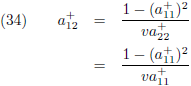
En met behulp van vergelijking (29) wordt dit tenslotte:
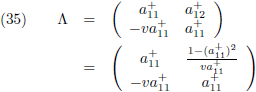
Zodat de
transformatiematrix
uiteindelijk wordt:
Die a
11+ ga ik vanaf nu a noemen en die breng ik buiten de
matrix:
Ik introduceer een derde stelsel en dat noem ik S’’.
Dit stelsel beweegt met een snelheid u ten opzichte van S’.
Voor de omrekening van coördinaten tussen de stelsels S’ en S’’ bestaat er uiteraard ook een
transformatiematrix.
Door al mijn voorgaande zetten te herhalen kom ik weer uit bij vergelijking (36) met een paar
kleine aanpassingen, de snelheid is u in plaats van v en ik geef de a’tjes indices om ze te kunnen
onderscheiden van de a’tjes in vergelijking (36):
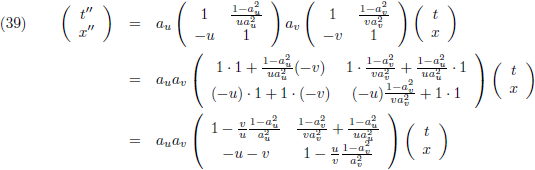
Ik kan ook coördinaten omrekenen tussen de stelsels S en S’’, dan krijg ik een tweetrapsraket:
Ik ga de twee
matrices met elkaar vermenigvuldigen:
Vergelijking (29) leerde ons dat de
elementen
van de
transformatiematrix
die op de
hoofddiagonaal
liggen gelijk zijn.
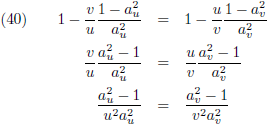
Dat moet dan nu ook gelden:
En aangezien de snelheden u en v willekeurig te kiezen zijn impliceert dit dat elke zijde van
vergelijking (40) een snelheidsonafhankelijke constante moet zijn.
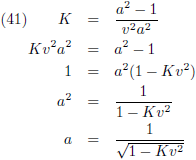
Die constante noem ik K:
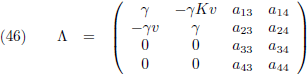
Hiermee wordt vergelijking (36):
Ik stel:
Hiermee kan ik de
transformatiematrix
schrijven als volgt:
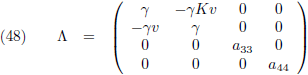
Na vergelijking (14) heb ik geen aandacht meer besteed aan de dimensies y en z, maar die zijn er natuurlijk wel degelijk:
Ik roep even de vergelijkingen (14c) en (14d) in herinnering:
Dit moet gelden op ieder tijdstip t voor iedere waarde van x en dat kan alleen indien
a
31 = a
32 = a
41 = a
42 = 0:
Nu heb ik nog acht onbekenden over, hoe ga ik die bepalen?
Ik heb reeds gesteld dat de x-as en de x’-as samenvallen, maar hoe de y-as, y’-as, z-as en z’-as gericht zijn daar heb
ik nog niets over gezegd en dus nog alle vrijheid in (want het zijn toch ‘slechts’ wiskundige abstracties).
Daarom roteer ik de z-as en/of z’-as zodanig dat het vlak dat gevormd wordt door de x-as en z-as getransformeerd wordt
naar het vlak dat gevormd wordt door de x’-as en z’-as (en vice versa).
Voor het x-z-vlak geldt y = 0 en voor het x’-z’-vlak geldt y’ = 0 en dit vul ik in in vergelijking (12c):
Dit moet altijd waar zijn, op ieder tijdstip t voor iedere waarde van x en iedere waarde van z, en dat kan alleen indien
a
31 = a
32 = a
34 = 0.
Dit hele verhaal kan ik ook ophangen voor het x-y-vlak zodat dat getransformeerd wordt naar het x’-y’-vlak.
Voor die beide vlakken geldt z = 0 respectievelijk z’ = 0 en dat vul ik in in vergelijking (12d):
Dit moet ook altijd waar zijn, op ieder tijdstip t voor iedere waarde van x en iedere waarde van y, en dat kan alleen
indien a
41 = a
42 = a
43 = 0.
Dat ik de y-as, y’-as, z-as en z’-as zodanig kan roteren om mijn bovenstaande betoog kloppend te maken werkt alleen
indien ik twee orthonormale stelsels heb.
In het plaatje aan het begin van deze pagina heb ik beide stelsels wel op die manier getekend, maar ik heb het nergens
expliciet vermeld.
Weer een aanname dus:
- alle coördinatenstelsels zijn orthonormaal.
Voor het y-z-vlak en het y’-z’-vlak gaat dit verhaal natuurlijk niet op, maar ik mag wel stellen dat dat op één tijdstip
wel waar is en dan kies ik natuurlijk het tijdstip t = 0.
Voor die beide vlakken geldt x = 0 respectievelijk x’ = 0 en dat vul ik in in de vergelijkingen (12a) en (12b):
Dit moet altijd waar zijn, voor iedere waarde van y en iedere waarde van z, en dat kan alleen indien
a
13 = a
14 = a
23 = a
24 = 0.
Aldus hebben we ons probleem gereduceerd van acht onbekenden naar twee:
Hiermee worden de vergelijkingen (12):
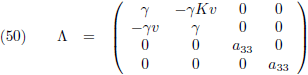
Wat hieraan opvalt is dat ik drie groepen variabelen heb, t/t’/x/x’, y/y’ en z/z’, die volledig onafhankelijk zijn van elkaar.
Omdat er werkelijk helemaal niets te bedenken valt (althans niet door mij) waarom er een ander verband zou moeten bestaan
tussen y/y’ en z/z’ moet wel gelden dat a
33 = a
44:
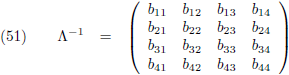
Hiervan ga ik de inverse
matrix bepalen:
De elementen van deze inverse
matrix
vormen zich als volgt (k = kolom, r = rij):
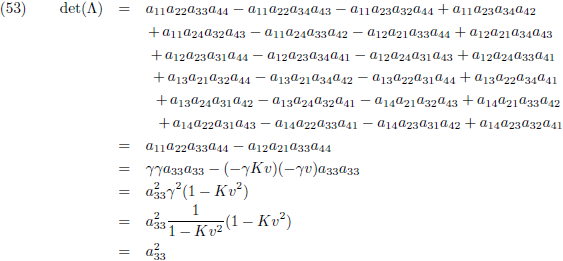
Ik ga eerst de
determinant
bepalen:
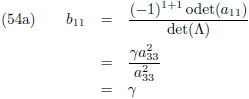
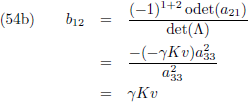
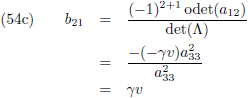
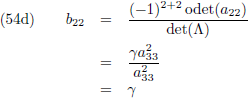
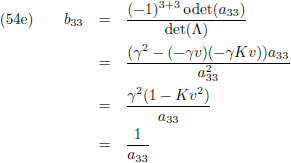
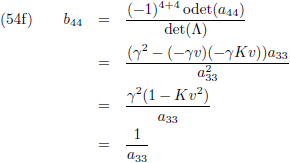
De
elementen
(die niet nul zijn) worden dan:
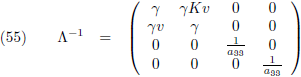
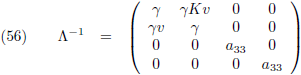
Zo vormt zich de inverse
matrix:
Dit resultaat moet identiek zijn aan wanneer ik in de
transformatiematrix
+v vervang door −v:
Wanneer ik de
matrices
van de vergelijkingen (55) en (56) met elkaar vergelijk dan kan het niet anders dan dat
a
33 = +1 of a
33 = −1.
Deze twee mogelijkheden weerspiegelen of de positieve delen van de y/y’/z/z’-assen in dezelfde
richting wijzen of in tegengestelde richting.
Ik kies a
33 = +1:
Wat de waarde is van K dat komt uiteraard uit dit mathematische verhaal niet naar boven.
Laat ik eens wat mogelijkheden onderscheiden:
- K > 0:
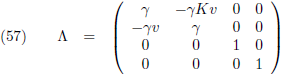
Tegenwoordig weten we dat voor K geldt:
Hiermee vormen zich de
Lorentz-transformaties:
Om dit stapje te maken heb je dan toch weer de wetten van Maxwell nodig, maar dat doet niets af aan het
spectaculaire resultaat van vergelijking (57).
Merk op dat er voor v = c oneindigheden ontstaan (de noemer van γ wordt nul), en dat voor v > c alles
wiskundig op de klippen loopt (de
wortel
van een negatief getal...).
Kortom, de lichtsnelheid c manifesteert zich ondubbelzinnig als de maximale snelheid.
- K = 0:
Hiermee vormen zich de Galileï-transformaties:
Dit zijn de klassieke ‘gezond-verstand-transformaties’ zoals die eeuwenlang golden voordat Einstein op het toneel verscheen.
Zoals vergelijking (60a) laat zien: tijd is altijd en overal simpelweg tijd.
Klassiek gezien wel te verstaan.
- K < 0:
Ik stel:
Het kwadraat hiervan is:
Daarmee wordt de factor γ:
De
cosinus
kan ik schrijven als een
functie van de tangens
waardoor vergelijking (63) vereenvoudigt tot:
Waarmee de
transformatiematrix
uiteindelijk wordt:
Hier staat een rotatie in het x-t-vlak (met de belangrijke kanttekening dat geen mens weet welke fysische
werkelijkheid hierbij hoort)!
Samengevat:
- K > 0: Lorentz-transformaties.
Fysische werkelijkheid: onze dagelijkse wereld.
- K = 0: Galileï-transformaties.
Fysische werkelijkheid: achterhaald.
- K < 0: ruimte-tijd-rotatie.
Fysische werkelijkheid: onbekend.
Ik zal de aannames die ik op deze pagina gemaakt heb even op een rijtje zetten:
- ruimte is homogeen (de ruimte ‘hier’ is niet anders dan de ruimte ‘daar’),
- tijd is homogeen (de tijd ‘nu’ is niet anders dan de tijd ‘straks’),
- ruimte is isotroop (de ruimte is in alle richtingen hetzelfde),
- transformaties zijn van dezelfde vorm als de inverse transformaties (het relativiteitsprincipe),
- alle coördinatenstelsels zijn orthonormaal.
Zoals ik aan het begin al zei: Newton zou dit ontdekt kunnen hebben.




































































 Daarmee wordt de factor γ:
Daarmee wordt de factor γ: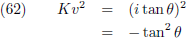 De cosinus kan ik schrijven als een functie van de tangens waardoor vergelijking (63) vereenvoudigt tot:
De cosinus kan ik schrijven als een functie van de tangens waardoor vergelijking (63) vereenvoudigt tot: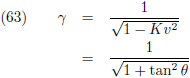 Waarmee de transformatiematrix uiteindelijk wordt:
Waarmee de transformatiematrix uiteindelijk wordt: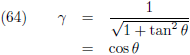 Hier staat een rotatie in het x-t-vlak (met de belangrijke kanttekening dat geen mens weet welke fysische werkelijkheid hierbij hoort)!
Hier staat een rotatie in het x-t-vlak (met de belangrijke kanttekening dat geen mens weet welke fysische werkelijkheid hierbij hoort)!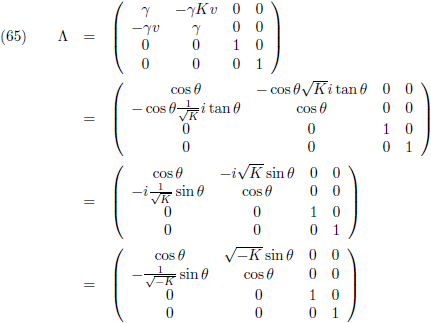
 Door naar het volgende vraagstuk: optellen van snelheden zonder invariantie van de lichtsnelheid
Door naar het volgende vraagstuk: optellen van snelheden zonder invariantie van de lichtsnelheid Terug naar het vorige vraagstuk: relativistische afleiding van de formule van Heaviside
Terug naar het vorige vraagstuk: relativistische afleiding van de formule van Heaviside Overzichtspagina met vraagstukken
Overzichtspagina met vraagstukken Overzichtspagina relativiteitstheorie
Overzichtspagina relativiteitstheorie De Lorentz-transformaties
De Lorentz-transformaties De maximale snelheid
De maximale snelheid Lineariteit van de Lorentz-transformaties
Lineariteit van de Lorentz-transformaties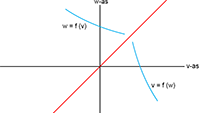 Directe snelheid en reciproke snelheid
Directe snelheid en reciproke snelheid Involuties
Involuties Matrices
Matrices Goniometrische functies in elkaar omschrijven
Goniometrische functies in elkaar omschrijven Differentiëren
Differentiëren Machtsverheffen, worteltrekken, logaritme nemen
Machtsverheffen, worteltrekken, logaritme nemen De integraal van
De integraal van De integraal van
De integraal van De integraal van
De integraal van De integraal van
De integraal van De integraal van
De integraal van De integralen van
De integralen van De integralen van
De integralen van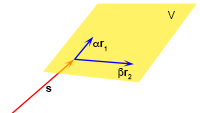 Vectoren, vraagstuk 4
Vectoren, vraagstuk 4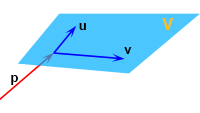 Vectoren, vraagstuk 49
Vectoren, vraagstuk 49 Vectoren, vraagstuk 94
Vectoren, vraagstuk 94 Taylor-reeksen
Taylor-reeksen De integraal van
De integraal van De Witte Dag
De Witte Dag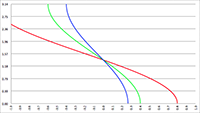 De integraal van
De integraal van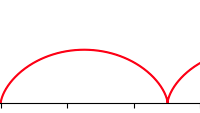 De cycloïde
De cycloïde De minimale straal van een holle bol
De minimale straal van een holle bol Een planeettijdreismachine
Een planeettijdreismachine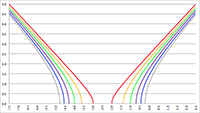 De integralen van
De integralen van Gravitationele rood-/blauwverschuiving
Gravitationele rood-/blauwverschuiving Getijdenkrachten
Getijdenkrachten Zijn wij vroeg of laat?
Zijn wij vroeg of laat? Overzichtspagina wiskunde
Overzichtspagina wiskunde Overzichtspagina natuurkunde
Overzichtspagina natuurkunde Overzichtspagina filosofie
Overzichtspagina filosofie Doneer enkele euro’s
Doneer enkele euro’s Wetenschappelijke boeken te koop
Wetenschappelijke boeken te koop Lezingen
Lezingen