Uitleg artikel algemene relativiteitstheorie: paragraaf 5
Trefwoorden: algemene relativiteitstheorie, Annalen der Physik, Die Grundlage der allgemeinen Relativitätstheorie/De grondslag van de algemene relativiteitstheorie, Königlich Preussischen Akademie der Wissenschaften/Koninklijke Pruisische Academie der Wetenschappen
Hoofdstuk B:
Wiskundige hulpmiddelen voor de opstelling van algemeen covariante vergelijkingen.
Paragraaf 5:
Contravariante en covariante viervectoren.
Om te beginnen wil ik hier eerst iets zeggen over de notatie van vectoren en hun componenten.
Stel je hebt een verplaatsingsvector
x (vectoren worden
vet gedrukt).
Dat wil zeggen, er is een verplaatsing vanaf een bepaald punt, bijvoorbeeld P, naar een ander punt, bijvoorbeeld Q.
Die afstand PQ wordt voorgesteld door de vector
x, met andere woorden: de vector
x stelt een verplaatsing voor over de
afstand van P naar Q.
Deze vector heeft uiteraard componenten en wel evenveel componenten als dat er dimensies zijn waarbinnen er verplaatst wordt.
In ons geval zijn er vier dimensies: drie ruimtelijke dimensies (noem ze lengte, breedte en hoogte, of x, y en z, of x
1,
x
2 en x
3) en de tijd (noem het tijd of t of x
4).
Zoals je ziet zet ik de indices hoog en daar heb ik goede redenen voor die later duidelijk zullen worden.
De vector
x heeft dus vier componenten en we kunnen
x daarom als volgt noteren:
Deze laatste notatie heeft een bepaalde aantrekkelijkheid door de regelmaat die daarin voorkomt.
Als we van die regelmaat gebruik maken, dan kunnen we ook overgaan op de volgende notatie:
De vermelding γ = 1, 2, 3, 4 (de dimensies) laten we vaak weg, omdat dat doorgaans wel duidelijk is uit de context.
De
componenten van de vector
x kunnen we dus simpelweg noteren als: x
γ.
Goed, dit was even een intro over de systematiek van de notatie.
Door het gebruik van indices noemen we dit de
indexnotatie.
Die vectorcomponenten hebben een bepaalde waarde, bijvoorbeeld
x (6, 2, −7, 54).
Dit betekent dan dat x
1 = 6, x
2 = 2, x
3 = −7 en x
4 = 54.
De kritische lezer zal nu direct naar voren brengen: wat betekent x
1 = 6 dan?
Zijn dat 6 meters of 6 centimeters?
En welke kant op?
De vectorcomponenten moeten dus gerelateerd zijn aan een bepaald referentiekader met een
basis,
oftewel een
coördinatenstelsel.
Als ik vervolgens dat coördinatenstelsel verander door het in elkaar te duwen, of uit te rekken, of over een bepaalde hoek te
draaien, of er tegenaan te schoppen zodat er deuken in komen en de assen niet meer loodrecht op elkaar staan (ervanuit gaande dat
ze dat eerst wel deden), dan heeft dat invloed op de componenten x
γ van de vector
x.
De vector
x zelf blijft natuurlijk volledig onaangetast, want het coördinatenstelsel is slechts een hulpmiddel voor ons om een kader
te geven aan de vector
x.
Als er morgen besloten wordt om in Nederland over te stappen van de meter op de yard dan verandert dat natuurlijk niets aan de
fysieke afmetingen van je huis.
En als er ook nog een gemeentelijke herindeling plaatsvindt dan beïnvloedt dat evenmin de fysieke afmetingen van je huis.
En dat geldt ook als door plaatselijke gaswinning de bodem tien centimeter daalt.
De vraag is dan: hoe veranderen de componenten van de vector x als (de
basis
van) mijn coördinatenstelsel verandert?
Einstein gooit die vergelijking gewoon in zijn artikel, maar hoe is hij daar aan gekomen?
Laten we daarvoor eerst voor het gemak aannemen dat de vector x uit twee componenten bestaat, x1 en x2.
Met andere woorden: x is een vector in een tweedimensionaal vlak (een gewoon vlak dus, bijvoorbeeld de keukentafel).
Twee dimensies is zo lekker makkelijk te tekenen en voor het principe verandert er niets ten opzichte van drie of meer dimensies.
Het ziet er dan uit als in onderstaande figuur.
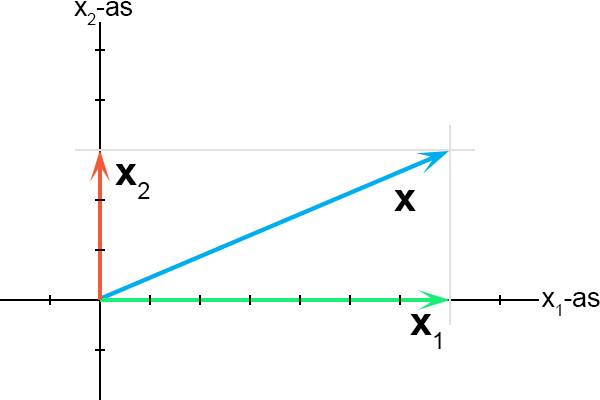
Figuur 5.1
Dit is een assenstelsel zoals je wellicht op school al vaak getekend hebt.
Even een interessant punt van aandacht: de componenten x1 en x2 kun je ook zien als vectoren
x1 en x2 die langs de coördinaatassen lopen.
De vector x bestaat uit componenten x1 en x2, x (x1, x2), maar die
componenten kun je op hun beurt ook weer zien als vectoren: x1 (x1, 0), x2
(0, x2).
Hier gaan we straks nog gebruik van maken.
Verder zien we dat de beide assen kaarsrecht zijn en loodrecht op elkaar staan.
En de afstanden tussen de getallen bij de assen staan ook keurig op regelmatige afstand van elkaar.
Dat de assen loodrecht op elkaar staan heet orthogonaal.
Een stelsel met orthogonale assen én regelmatige afstanden tussen de getallen heet Cartesisch
(naar de Franse wiskundige René Descartes).
Goed, dit is dus precies zoals Einstein het
niet wil!
Voor hem heeft een punt simpelweg coördinaten die aan ‘één of ander’ coördinatenstelsel gerelateerd zijn.
Laten we eens uitgaan van een willekeurig punt P in een willekeurige ruimte met n dimensies.
Als coördinatenstelsel nemen we uiteraard ook iets willekeurigs: rechte assen of kromme assen, die wel of niet haaks op elkaar
staan, bedenk het maar.
Dit coördinatenstelsel noemen we α.
Ook al ligt er dus niets vast, we kunnen wel een bepaalde aanduiding geven voor het punt P als volgt:
Pα
(x
α1, x
α2, ... , x
αn).
Hier staat dat het punt P in het stelsel α de coördinaten x
α1, x
α2, ... , x
αn
heeft, oftewel de positievector
P (een vector, van de oorsprong naar het punt P, en daarom
vet gedrukt) in het
stelsel α heeft de componenten (x
α1, x
α2, ... , x
αn).
Als we overstappen op een ander coördinatenstelsel dan heeft het punt P natuurlijk ook coördinaten in dat andere stelsel.
Dit andere stelsel noemen we β en de componenten van
P zijn dan:
Pβ (x
β1,
x
β2, ... , x
βn).
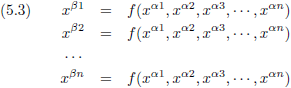
Op de een of andere manier zijn die componenten/coördinaten natuurlijk in elkaar om te rekenen, met andere woorden:
de β-coördinaten zijn een functie van de α-coördinaten.
Dat ziet er dan als volgt uit:
Dat dit wellicht gruwelijk ingewikkelde functies zijn dat boeit ons niet, de coördinaten zijn in elkaar om te rekenen en daar gaat het ons om.
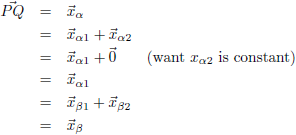
Stel nu dat er verderop een punt Q ligt.
Van P naar Q loopt een vector
xα maar dit komt ook overeen met een vector
xβ.
Hoe zijn de componenten van die vectoren in elkaar om te rekenen?
Oftewel, hoe veranderen de β-coördinaten gerelateerd aan die van het α-stelsel?
De omrekenvergelijking wordt dan in woorden:
- De veranderingen van de β-coördinaten komen overeen met een verandering in de α-coördinaten en wel in die mate
zoals de β-coördinaten in de diverse α-richtingen gerelateerd zijn aan de α-coördinaten.
Dit klinkt heel ingewikkeld, dus daar maak ik ook even een plaatje van:
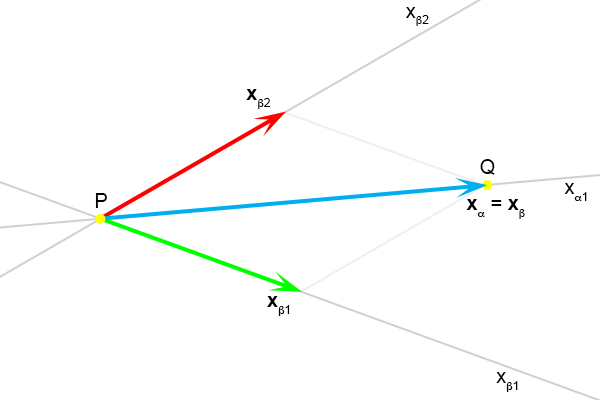
Figuur 5.2
Voor het gemak doen we of de verplaatsing van P naar Q in het α-stelsel via één coördinaat gaat, in dit voorbeeld x
α1.
Op het traject PQ is de andere α-coördinaat x
α2 dus constant, en daarom heb ik de x
α2 as voor
de overzichtelijkheid niet getekend.
Ik heb ook twee (willekeurige) assen getekend die aangeven hoe de β-coördinaten veranderen in dit deel van het vlak.
Uitgedrukt in vectoren geldt dan (de
x vectoren zijn kleine vectoren die verplaatsingen aangeven):
Even een klein intermezzo, stel je hebt de volgende rechte lijn: y = ax.
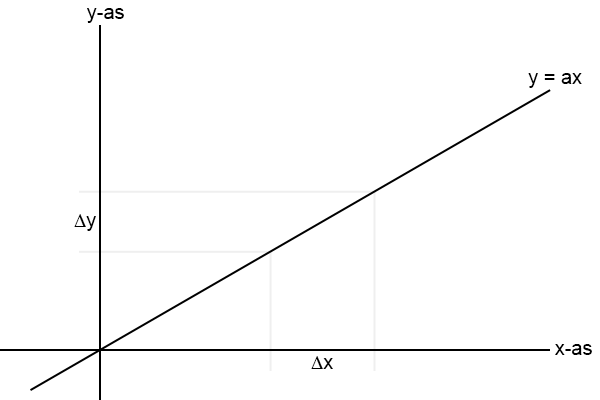
Figuur 5.3
In de vergelijking y = ax geeft a de helling van de lijn aan, oftewel: hoe steil de helling van de lijn is.
In iets abstractere woorden: hoe y gerelateerd is aan x.
Als ik bijvoorbeeld vier x eenheden naar rechts ga en dan tevens twee y eenheden omhoog moet, dan is a = 2/4 = 0.5.
Of anders geschreven: a = ∆y/∆x.
De vergelijking voor de lijn wordt dan: y = ∆y/∆x x.
Hier staat dat de verandering van y gelijk is aan de mate waarin y gerelateerd is aan x maal de verandering van x.
Even voortbordurend op het voorbeeld dat a = 2/4 = 0.5; als x dan 6 verandert, dan leidt dat tot een verandering
in y van 0.5 maal 6 = 3.
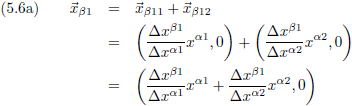
Deze kennis gaan we gebruiken voor de
xβ vectoren die het lijnstuk PQ vormen (let op:
vet
gedrukt zijn vectoren en tussen haakjes staan de componenten waaruit de vector is opgebouwd):
Ik heb hier bij x
β nog een extra index ‘1’ aangebracht om aan te geven dat het hier gaat om hoe x
β
gerelateerd is aan x
α1.
En waarom staan hier componenten in die gelijk zijn aan nul?
Omdat x
β1 langs de β
1-as loopt en dus per definitie geen β
2 component heeft.
En voor x
β2 geldt dan uiteraard precies het omgekeerde.
Lees anders voor extra toelichting nog even het stukje tekst onder figuur 5.1.
We hebben hiervoor aangenomen dat de verplaatsing PQ langs de x
α1-as liep, maar we hadden natuurlijk ook de
x
α2-as kunnen nemen.
Voor de verplaatsing in het β-stelsel was er dan uitgekomen:
Ik heb hier een extra index ‘2’ aangebracht om aan te geven dat het er nu om gaat hoe x
β gerelateerd is aan x
α2.
De logische volgende stap is dan een verplaatsing in het α-stelsel die zowel in de x
α1-richting gaat als in de
x
α2-richting, een combinatie van beide dus.
Beide richtingen hebben dan een invloed op de verplaatsing in het β-stelsel als volgt (vectoren tel je bij elkaar op door de
componenten bij elkaar op te tellen):
De verplaatsing in het β-stelsel is de som van deze vectoren:
Omdat we het hier hebben over oneindig kleine afstanden vervangen we de ∆’s door d’s, en omdat de x
β-coördinaten
functies zijn van meerdere x
α-coördinaten vervangen we de d’s gelijk door ∂’s:
Je hebt natuurlijk allang een brandende vraag op je lippen: in alle plaatjes staan rechte assen en rechte verplaatsingen
getekend terwijl we het toch over alle mogelijke (kromme, gebogen) varianten zouden hebben?
Heel goed opgemerkt, daarom gaan we nog één extra verfijning aanbrengen.
We gaan ons beperken tot het oneindig kleine, netjes gezegd: iedere verplaatsing is infinitesimaal klein.
In het oneindig kleine is immers alles recht.
Daar waar je staat is de bodem onder je voeten gewoon vlak en is er niets meer zichtbaar van de kromming van de Aarde.
Dit oneindig kleine geven we aan met de letter d:
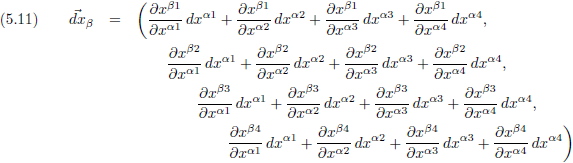
Dit kunnen we uiteraard gemakkelijk extrapoleren naar drie dimensies:
En vervolgens naar vier dimensies:
Okee, dit kan geen mens meer fatsoenlijk lezen.
Daarom gaan we in lijn met de notatieintroductie aan het begin van deze paragraaf dit even wat opschonen:
Dit is de vergelijking voor één enkele component van de vector d
xβ waarbij σ = 1, 2, 3, 4.
En dit kunnen we nog wat verder indikken als volgt:
Hierbij moeten we sommeren over de waarden van ν = 1, 2, 3, 4.
Dat zowel σ als ν de waarden 1, 2, 3, 4 doorlopen, dat denken we er ‘gewoon’ bij.
Wat we er intussen ook ‘gewoon’ bijdenken is dat α het ‘ene’ coördinatenstelsel aanduidt en β het ‘andere’ coördinatenstelsel.
Maar dat blijft niet de hele tijd zo duidelijk, omdat we verderop lekker met de indices gaan goochelen.
Daarom geven we de coördinaten in het β-stelsel, het ‘andere’ stelsel, een apostroph mee en de α’s en β’s laten we
vanaf nu gewoon weg:
 Oorspronkelijke vergelijking uit het artikel van Einstein:
Oorspronkelijke vergelijking uit het artikel van Einstein:

Vergelijking (5.14) wordt door Einstein er zomaar effe ingegooid en heet de
transformatievergelijking.
Hopelijk neemt hij niet telkens van deze grote stappen.
Maar waar het Einstein om gaat is hoe ‘iets’ in het ene stelsel transformeert naar iets in het andere stelsel.
En of dat nou een verplaatsing is of een kracht of wat dan ook maakt niet uit (Einstein heeft het over ‘ieder ding’).
Daarom vervangt hij de dx door
A, en
A kan van alles zijn (verplaatsing of kracht of zweetlucht of...).
Vergelijking (5.14) wordt dan:
 Oorspronkelijke vergelijking uit het artikel van Einstein:
Oorspronkelijke vergelijking uit het artikel van Einstein:

Maar hier gebeurt iets essentieels, want de indices bij de
A’s staan bovenaan en niet onderaan.
Stel dat ik
Aν twee keer zo groet noem, ik noem ze bijvoorbeeld acht terwijl ze eerst vier waren
(terwijl er fysiek niets verandert!), dan zal ∂x
σ'/∂x
ν de helft worden omdat er
anders ineens hele andere waarden uitkomen voor
Aσ'.
Deze tegenbeweging,
Aν wordt groter en dus wordt ∂x
σ'/∂x
ν
evenredig kleiner, heet
contravariant.
Dit is heel belangrijk om goed te begrijpen en daarom kijken we nog eens naar figuur 5.1, maar dan met de
basisvectoren
erbij in getekend.
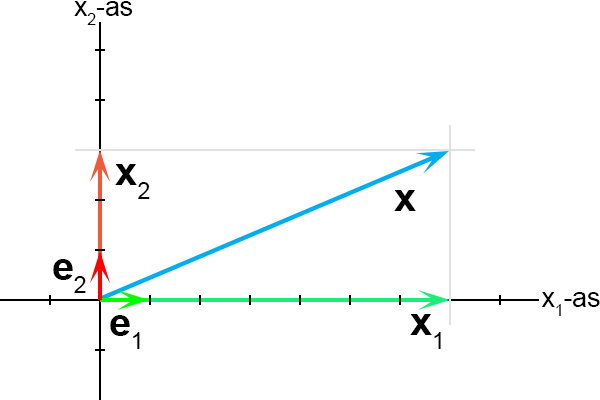
Figuur 5.4
Zoals ik eerder al zei bestaat de vector
x uit de componenten x
1 en x
2,
x (x
1,
x
2), maar die componenten kun je op hun beurt ook weer zien als vectoren:
x1 (x
1, 0),
x2 (0, x
2).
De
basisvectoren
zijn eenheidsvectoren (vectoren met de lengte één) en liggen op de assen (eentje op elke as) met hun staart
(de niet-pijlpunt) in de oorsprong.
Er zijn dus net zoveel
basisvectoren
als dimensies (in het plaatje van figuur 5.4 zijn het er twee).
De
basisvectoren
hebben de eigenschap dat ze
onafhankelijk zijn van elkaar, dit houdt in dat het
nooit mogelijk
is om een
basisvector
te beschrijven als de som van andere
basisvectoren
(in zijn algemeenheid geldt dat een aantal vectoren
onafhankelijk is van elkaar indien voor
iedere vector geldt dat die niet te beschrijven is als som van de andere vectoren).
Iedere
niet-
basisvector
is te beschrijven als de som van
basisvectoren,
in figuur 5.4 is de vector
x de som van zeven
basisvectoren
e1 (= de vector
x1) en drie
basisvectoren
e2 (= de vector
x2).
De componenten van
x zijn dus (7, 3).
De
basisvectoren
en (ik generaliseer even voor n dimensies) vormen de
vectorbasis
(dit is een open deur) of kortweg
basis.
Ik kan in figuur 5.4 nog een ziljoen vectoren erbij tekenen die allemaal samengesteld kunnen worden uit de
basisvectoren
e1 en
e2 totdat het vlak helemaal zwart ziet van de vectoren.
Dit zwarte vlak noemen we een
vectorruimte, ongeacht of we, zoals in figuur 5.4, 2 dimensies hebben of 3 of misschien wel 57,
we zeggen altijd dat de
basisvectoren
een
basis
vormen voor een vectorruimte.
Wanneer we nu in figuur 5.4 overgaan van
basisvector
e1 op
basisvector
e1', waarbij
e1' exact tweemaal zo groot is als
e1,
dan zal de eerste component van
x half zo groot
worden want aan de vector
x zelf verandert helemaal niets.
De beschrijving van
x verandert dus wel, maar aan de pijl die de vector voorstelt verandert niets.
Deze nieuwe beschrijving van
x noem ik
x'.
In de nieuwe
basis
worden de componenten van
x' dan (3.5, 3).
Dus als de nieuwe
basisvector
e1' p maal zo groot is als
e1, dan wordt de eerste component van
x' 1/p maal zo groot (= p maal zo klein), een tegenbeweging dus.
‘Gewone’ vectoren transformeren aldus contravariant, zij krijgen een hoge index mee en we noemen ze
contravariante
vectoren.
Basisvectoren
transformeren
covariant, zij krijgen een lage index mee en we noemen ze
covariante vectoren
of
covectoren.
Dus covariant → lage index, en contravariant → hoge index.
Onthouden hoor!
Om de een of andere reden licht Einstein dit belangrijke detail niet toe, dus bij deze.
En hoe weet je of hoge indices geen exponenten van
machten moeten voorstellen?
Dat weet je niet, dat blijkt uit de context van het verhaal.
Ga er maar van uit dat in het geval van relativiteitstheorie er doorgaans sprake is van indices en niet van exponenten.
En als het niet zo is, dan is het anders (Johan Cruijff zou het gezegd kunnen hebben...).
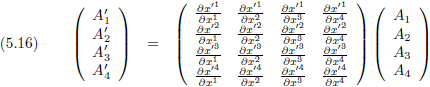
Als we vergelijking (5.15) vergelijken met (5.11) dan zien we duidelijk dat
A een vector is met vier componenten.
Vandaar dat Einstein het heeft over viervectoren.
Dit wordt extra duidelijk als we vergelijking (5.11) als volgt herschrijven (met d
x vervangen door
A):
Dat indrukwekkende blok hierboven met al die
partiële afgeleiden
(de kromme d’s) heet in zijn totaliteit de
transformatiematrix en wordt aangeduid
met de letter Λ.
Een
matrix in zijn algemeenheid (en volgens de definitie)
is niets meer dan een in rijen en kolommen geordende getallenverzameling.
Kort gezegd: een
matrix is een verzameling getallen zonder
verdere randvoorwaarden of betekenis.
Wanneer je opschrijft hoeveel spruitjes je de afgelopen vier dagen per dag hebt gegeten dan heb je een
1 × 4
matrix (als je de
aantallen naast elkaar zet) of een 4 × 1
matrix
(als je de getallen boven elkaar zet).
Spreek dit uit als “1 bij 4
matrix” of
“4 bij 1
matrix”.
Die 1 × 4 of 4 × 1 heet de
orde van de
matrix.
En al die
partiële afgeleiden,
zestien in dit geval (het is een 4 × 4
matrix),
zijn de
elementen van de
transformatiematrix
(vectoren en tensoren hebben componenten en
matrices
hebben
elementen).
Hierboven hebben we het gehad over contravariante vectoren (met een hoge index).
En ik noemde ook al even
covariante vectoren, hierbij nemen de
differentialen ∂.../∂... juist toe als de
componenten van
A toenemen.
In geval van covariantie gebruiken we lage indices (ik kan het niet vaak genoeg zeggen).
Stel dat
A een covariante vector is en
B een contravariante vector, dan is hun product invariant:
 Oorspronkelijke vergelijking uit het artikel van Einstein:
Oorspronkelijke vergelijking uit het artikel van Einstein:

Voor de vector
A nemen de
differentialen
∂.../∂... toe met de componenten, en voor de vector
B nemen
de
differentialen
∂.../∂... af met de componenten.
Het netto veranderingsresultaat is nul en dit heet invariantie.
In het andere stelsel levert dit dan hetzelfde invariante resultaat op:
 Oorspronkelijke vergelijking uit het artikel van Einstein:
Oorspronkelijke vergelijking uit het artikel van Einstein:

Als we eerst vergelijking (5.15) herschrijven door de
differentiaal
omgekeerd (teller en noemer te verwisselen) naar de andere
kant te halen en
A te vervangen door
B:
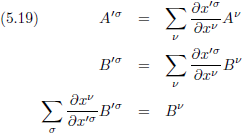 Oorspronkelijke vergelijking uit het artikel van Einstein:
Oorspronkelijke vergelijking uit het artikel van Einstein:

En dit substitueren (vervangen) we vervolgens in vergelijking (5.18):
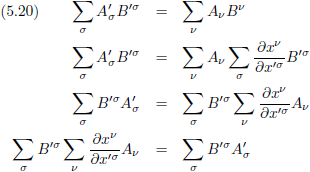 Oorspronkelijke vergelijking uit het artikel van Einstein:
Oorspronkelijke vergelijking uit het artikel van Einstein:

Wanneer we dan ∑
Bσ' uitdelen, en ook nog een beetje herschikken, dan volgt daaruit:
 Oorspronkelijke vergelijking uit het artikel van Einstein:
Oorspronkelijke vergelijking uit het artikel van Einstein:

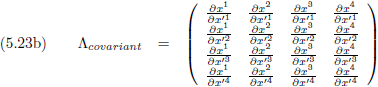
Het verschil met vergelijking (5.15) is dat de
differentiaal
∂.../∂... hier ondersteboven staat, teller en noemer
zijn verwisseld.
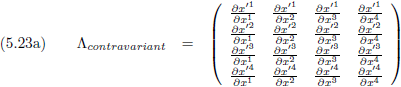
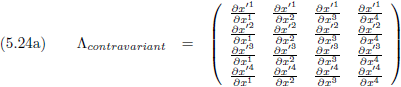
Aldus hebben we twee
transformatiematrices:
En als ik dat helemaal uitschrijf:
Hoe zijn de
elementen van de ene
matrix gerelateerd aan de andere?
Door alleen maar van elk
element de
reciproke waarde te nemen ben ik er nog niet (reciproke waarde = 1/waarde = teller en noemer omwisselen).
Ik moet ook nog de
elementen van de
matrix spiegelen in de
hoofddiagonaal (de diagonaal van linksboven naar
rechtsonder), of beter gezegd: elk
element
e
rk (de index r duidt de rij aan en de index k duidt de kolom
aan) ‘verhuist’ naar de positie e
kr (rijen en kolommen worden verwisseld).
Dit laatste is correcter dan ‘spiegelen in de
hoofddiagonaal’, want een
matrix hoeft absoluut niet vierkant te zijn
(een
vierkante matrix heeft evenveel rijen
als kolommen).
Dit proces van rijen en kolommen verwisselen heet
transponeren of de
transponent nemen en
daaruit ontstaat dan een
getransponeerde
matrix die we aangeven met de hoge index T als volgt:
B = A
T (B is de
getransponeerde van A).
Wanneer ik alle
elementen van een
transformatiematrix
transponeer én van elk
element
de reciproke waarde neem dan ontstaat de andere
transformatiematrix.
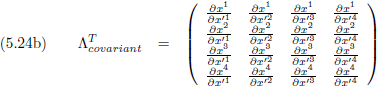
Om te beginnen
transponeren we één der
transformatiematrices, bijvoorbeeld
Λ
covariant (Λ
contravariant blijft ongewijzigd):
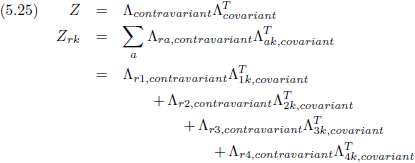
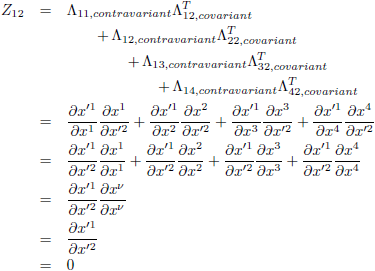
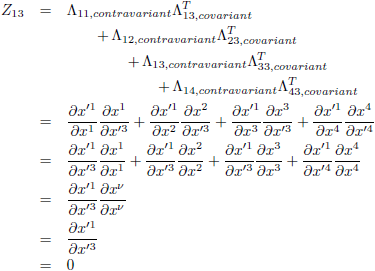
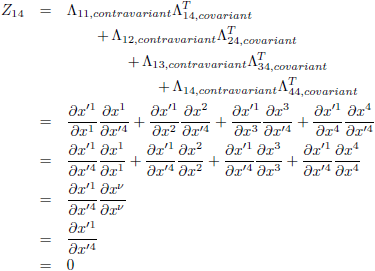
En omdat wiskunde zo ontzettend leuk is gaan we deze twee
matrices gewoon eens met elkaar vermenigvuldigen.
De
elementen van de
matrix Z die daaruit ontstaan berekenen
we als volgt (r = rij, k = kolom, a = 1, 2, 3, 4):
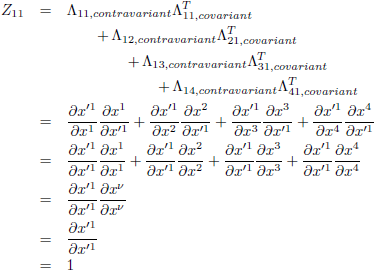
Daar gaan we dan:
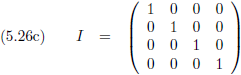
Je ziet waarschijnlijk al wel wat er gaat gebeuren, de
hoofddiagonaal van Z gaat zich vullen met enen
en voor de rest bestaat Z uit allemaal nullen.
Een dergelijke
matrix heet de
eenheidsmatrix I.
Er geldt dus:
Als de vermenigvuldiging van twee
matrices de
eenheidsmatrix
oplevert dan is de ene
matrix de
inverse matrix
van de ander en dat geven we aan met een exponent −1.


We zijn in deze paragraaf gekomen tot twee vergelijkingen voor contravariante transformaties respectievelijk covariante transformaties.
Op dit punt werd Einstein het echter helemaal beu om telkens de sommatietekens te moeten opschrijven en stelde
daarom de volgende regel op: overal waar indices precies twee keer voorkomen denken we het sommatieteken ∑ er gewoon bij.
Deze regel staat nu te boek als de sommatieconventie van Einstein.
Die index waar over gesommeerd moet worden heet de dode index of dummy index.
De andere index heet de lopende index.
Om te onthouden: lopende indices bevinden zich aan beide zijden van een vergelijking en dummy indices slechts aan één zijde.
Verder merkt hij nog op dat hij zich met de plaats van de indices aansluit bij Ricci-Curbastro en Levi-Civita,
twee Italianen die hun sporen reeds hadden verdiend in dit deel van de wiskunde.
Dat betekent dat er normaliter gesommeerd wordt over een index die eenmaal op een hoge positie staat en eenmaal op een lage positie.
En een hoge index duidt altijd op contravariant en een lage index op covariant.
Dit laatste geldt alleen bij de vectoren, of hun componenten, want bij de
differentialen staan altijd ‘gewoon’ lage indices.
Deze paragraaf, die in het teken stond van wiskundige transformaties van een willekeurig coördinatenstelsel naar een
ander willekeurig stelsel, luidt samengevat als volgt.
Contravariante transformatie:
Covariante transformatie:
Dit ziet er allemaal prachtig en indrukwekkend uit, maar hoe werkt dit nou uit in de echte wereld (nooit vergeten: allerlei
wiskundige abstracties zijn leuk, maar we leven uiteindelijk in de werkelijkheid!)?
Dat gaan we eens even tot op de bodem uitzoeken middels een voorbeeld.
Laat ik weer eens beginnen met een plaatje:
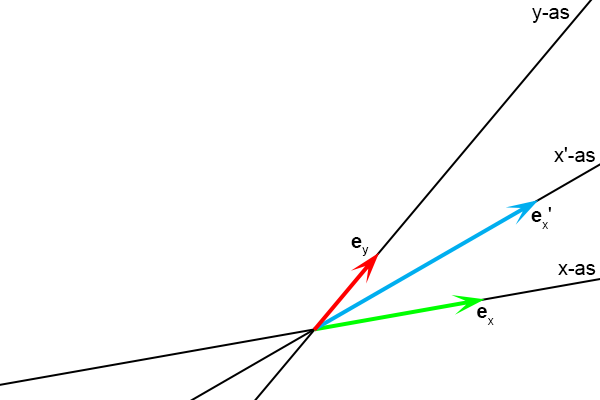
Figuur 5.5
Ik heb hier een x-y-assenstelsel getekend met daarin de
basisvectoren
ex en
ey.
De componenten van deze
basisvectoren
zijn per definitie
ex (1, 0)
x-y en
ey (0, 1)
x-y, want
basisvectoren
zijn eenheidsvectoren die gelegen zijn langs (of op?) een as van het assenstelsel.
Van een
basisvector
is altijd één component gelijk aan 1 en de andere componenten zijn allemaal gelijk aan 0.
Ik heb de indices x-y eraan ‘gehangen’ om aan te geven dat dit de componenten zijn van
ex en
ey in het x-y-assenstelsel.
De vector
ex' heeft uiteraard ook componenten:
ex' (1, 0)
x'-y'.
In het x'-y' assenstelsel (waarvan ik de y'-as nog niet getekend heb) is
ex' een
basisvector
en heeft daarom per definitie de componenten (1, 0).
Het is duidelijk te zien dat
ex' een andere richting en grootte heeft dan
ex.
Dat is interessant om wiskundig te benoemen.
Daartoe ga ik
ex' projecteren op de x-as.
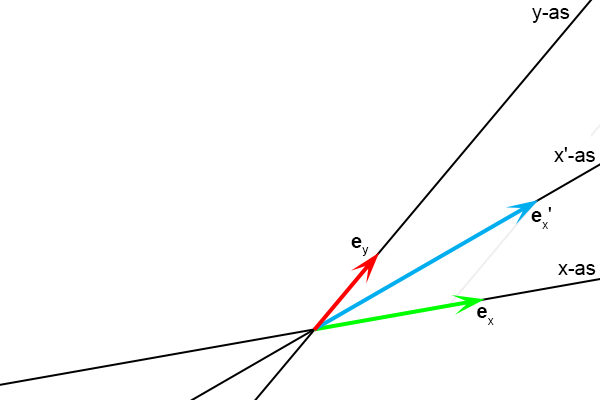
Figuur 5.6
De stippellijn projecteert
ex' op de x-as.
Nu willen we weten waar die stippellijn de x-as snijdt.
Daarvoor zal ik eerst maar eens wat hoeken aangeven in de figuur.
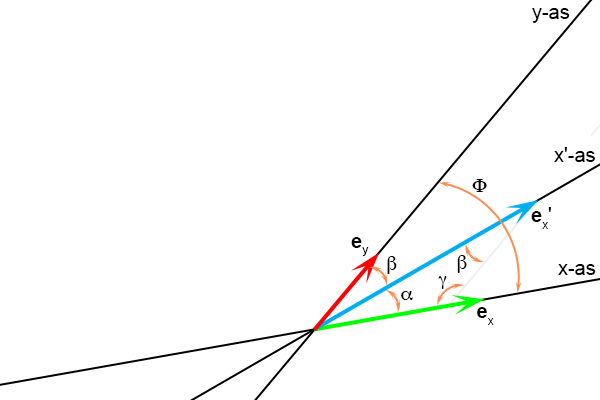
Figuur 5.7
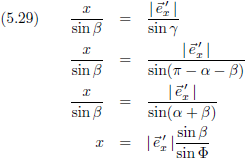
Wanneer ik de projectie van
ex' op de x-as x noem, dan geldt het volgende
(met gebruik van de
sinusregel:
in een willekeurige driehoek is een hoek gedeeld door de grootte van de overliggende zijde voor elke hoek gelijk):
Hier staat eigenlijk: hoever ben ik gevorderd in de x-richting wanneer ik in de x'-richting al |
ex' | op weg ben?
Echter, wat nog veel belangrijker is, is dat we appels en peren uit elkaar houden.
Als ik bezig ben in x'-y' coördinaten dan is |
ex' | gelijk aan 1, maar dit betekent dat de x die we dan uitrekenen
ook in x'-y' coördinaten is.
De
sinussen
in vergelijking (5.29) zijn alleen afhankelijk van de hoeken α en β.
Wanneer ik de vector
ex' langer of korter maak dan verandert er helemaal niets aan de
sinussen, omdat de hoeken
α en β dan niet wijzigen.
Stel dat de breuk met die twee
sinussen
gelijk is aan a dan staat er x = a |
ex' |.
In het x'-y'-stelsel is |
ex' | per definitie gelijk aan 1 en x is dan dus altijd gelijk aan a.
In het x-y-stelsel daarentegen verandert |
ex' | wanneer ik die vector langer of korter maak en de waarde van x
loopt dan evenredig mee (zoals in het plaatje duidelijk te zien is).
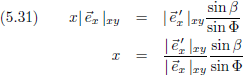
In vergelijking (5.29) is het dus noodzakelijk dat |
ex' | daar staat in x-y afmetingen dus dat voeg ik alsnog
nadrukkelijk toe in de vergelijking.
Nu staat er pas echt: hoever ben ik gevorderd in de x-richting (van het x-y-stelsel) wanneer ik in de x'-richting al
|
ex' |
x-y op weg ben?
Die x zegt in feite: hoe vaak de vector
ex achter elkaar gelegd moet worden om het geprojecteerde deel
van
ex' ‘te vullen’.
Als ik het helemaal netjes had gedaan dan had ik achter die x nog |
ex |
x-y toegevoegd, maar
omdat dat altijd 1 is voegt dat niets zinvols toe.
Aan de andere kant is het wel belangrijk om accuraat te werken dus laat ik het toch maar doen.
Herken je hierin wat ik hiervoor (net voor figuur 5.2) schreef?
- De veranderingen van de β-coördinaten komen overeen met een verandering in de α-coördinaten
en wel in die mate zoals de β-coördinaten in de diverse α-richtingen gerelateerd zijn aan de α-coördinaten.
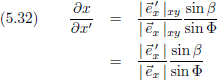
Met andere woorden:
De x-y indices heb ik weggelaten want het lijkt me logisch dat je
ex' en
ex in hetzelfde
stelsel met elkaar vergelijkt (anders ben je weer bezig met appels en peren te vergelijken).
Ik zou er dus ook x'-y' indices bij kunnen zetten.
Die breuk met de
sinussen
geeft de relatie aan tussen de ‘opmars’ in de x'-richting (∂x') en de overeenkomstige ‘opmars’
in de x-richting (∂x).
En die breuk met de groottes van
ex' en
ex is eigenlijk een aanpassingsfactor van de
eenheden in het ene systeem ten opzichte van het andere systeem (misschien werken ze in het ene systeem met yards en in het
andere systeem met kilometers).
Tenslotte dit alles samengevat in één zin: ik projecteer
ex' op de x-as, en hoeveel maal past de vector
ex in dat geprojecteerde stuk?
Daarnaast ben ik natuurlijk ook geïnteresseerd in de projectie van
ex' op de y-as.
Figuur 5.8
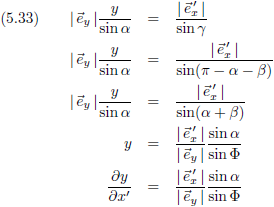
Wanneer ik de projectie van
ex' op de y-as y noem, en de afleiding weer net zo uitvoer als in vergelijking (5.29):
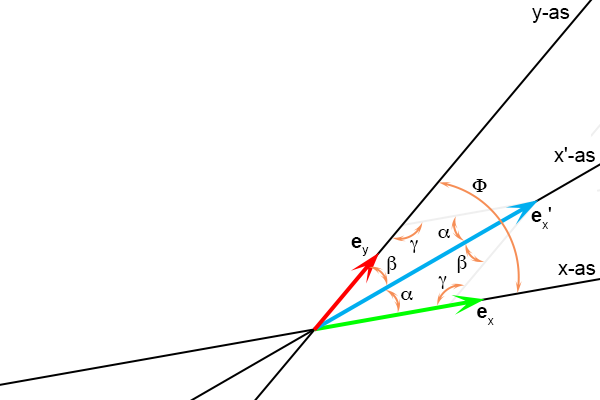
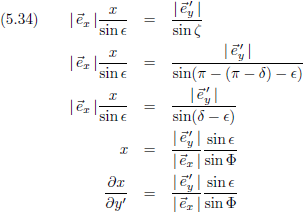
En dit gaan we uiteraard ook doen voor de projecties van
ey' op de x-as en y-as.
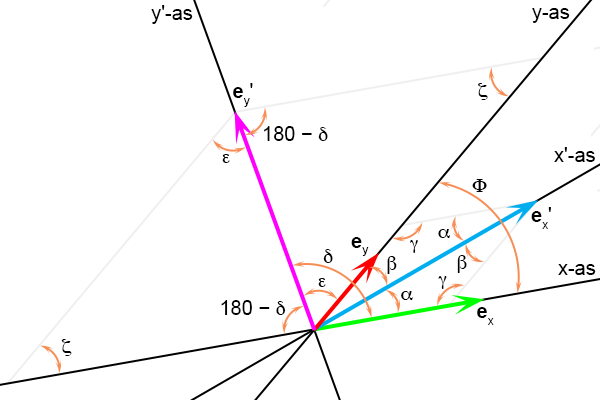
Figuur 5.9
Dit plaatje ziet er op het eerste gezicht wat vreemd uit omdat
ey' helemaal naar links overhelt,
maar dat mag natuurlijk voor het eindresultaat niets uitmaken.
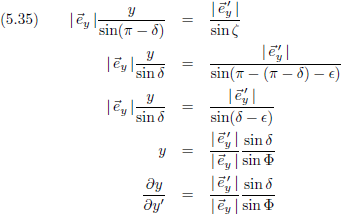
Een goed moment om de resultaten te groeperen:
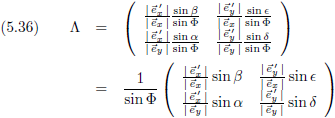
Uiteindelijk ziet de
transformatiematrix er zo uit:
Het volgende inzicht is hier ook wel handig.
De linker twee
elementen
van de
transformatiematrix
vormen de nieuwe
basisvector
ex' waarvan de componenten uitgeschreven zijn in de oude
basisvectoren
ex en
ey, en de rechter twee
elementen
vormen de nieuwe
basisvector
ey' waarvan de componenten uitgeschreven zijn in de oude
basisvectoren
ex en
ey.
Oftewel, links staat hoeveel stuks
ex en hoeveel stuks
ey ik nodig heb om de
vector
ex' samen te stellen en rechts staat hoe ik de vector
ey' samenstel
uit vectoren
ex en
ey.
Laten we de hele
matrix
eens wat versimpelen door te stellen dat alle
basisvectoren
e een grootte hebben van 1, dus
|
ex | = |
ey | = |
ex' | = |
ey' | = 1.
De
transformatiematrix
versimpelt daardoor tot:
En laten we voor het gemak ook ervanuit gaan dat de y-as loodrecht op de x-as staat (dus Φ = 90 graden, en
sin Φ = 1), en dat de y'-as ook loodrecht op de x'-as staat.
De
transformatiematrix versimpelt daardoor verder tot:
Omdat ook geldt dat sin β = sin (90 − α) = cos α en sin δ = sin (90 − ε) = cos ε
wordt dit:
Omdat we bovendien nog moeten bedenken dat Φ = α + β = δ + ε ontkomen we niet aan de conclusie
dat α = −ε.
De
transformatiematrix ziet er dan zo uit,
uitgedrukt in α:
En dit komt vast nog wel bekend voor uit
paragraaf 4.
Kijk maar eens naar de vergelijkingen (4.12a) en (4.12b).
Oftewel, we hebben hier de
transformatiematrix
van een rotatie die we in
paragraaf 4 zo uitgebreid onderzocht hebben!
Tot slot nog een belangrijke opmerking.
Ik heb hiervoor ook aangetoond hoe je aan de
transformatiematrix komt die
‘de andere kant op werkt’ door de reciproke
waarde te nemen van de
elementen van de
matrix en vervolgens
de
matrix ook nog te
transponeren.
Let wel: daar werkte ik met
differentialen.
En ∂x'/∂x omkeren in ∂x/∂x' levert iets heel anders op dan
|
ex' |/|
ex | sin β/sin Φ omkeren in
|
ex |/|
ex' | sin Φ/sin β.
Het omkeren van |
ex' |/|
ex | in |
ex |/|
ex' | werkt
wel goed, maar de breuk met
sinussen
omkeren absoluut
niet.
Aan die breuk met die
sinussen
verandert helemaal niets (aan de vergelijking zelf), maar ik dien te bedenken dat Φ
(de hoek tussen de assen) nu de hoek tussen twee andere assen betreft dan bij de ‘heentransformatie’.
En de andere hoeken die ik benoemd heb kloppen ook niet meer, β wordt δ en δ wordt β,
en α en ε dienen vermenigvuldigd te worden met −1:
| Transformatie |
Inverse transformatie |
| α |
−α |
| β |
δ |
| δ |
β |
| ε |
−ε |
| Φ = α + β = δ + ε |
Φ = δ − α = β − ε |
| Tabel 5.1 |
Nog even dit voorbeeld van covariante transformatie tot slot van deze paragraaf.

Stel je eens een weiland voor en dit weiland staat vol met grassprieten.
Al die grassprieten zijn natuurlijk niet even lang waardoor het oppervlak van het weiland een soort glooiende groene deken wordt.
De hoogte (= lengte) van al die grassprietjes kan ik opmeten en uiteindelijk heb ik dan letterlijk een veld vol met getallen,
dit noem ik een scalarveld.
Ik kan ook bij mij in de huiskamer overal de temperatuur gaan opmeten.
Dan heb ik daarna weliswaar een driedimensionale hoeveelheid getallen maar dat heet dan toch een scalarveld.
Terug naar het weiland, ik heb alle grassprieten opgemeten en dat ga ik allemaal invoeren in de computer en ik kan daar een
functie f (x, y) omheen bouwen (een programmaatje of zo) die voor elk punt van het weiland aangeeft wat de hoogte van het gras
is wanneer ik een bepaalde x en y invoer.
Deze f (x, y) beschrijft het oppervlak van het weiland, de glooiende groene deken.
Wanneer ik f (x, y) differentieer naar x respectievelijk y dan krijg ik een beschrijving van het glooien van de groene deken,
oftewel, als ik ‘overstap’ van het ene grassprietje naar de volgende ga ik dan iets omhoog of iets omlaag of geen van beide
(indien het volgende grassprietje even lang is)?
Deze afgeleiden
zijn formeel geschreven ∂f/∂x en ∂f/∂y.
Indien ik x benoem als zijnde x1 en y als x2 dan kan ik ook schrijven: ∂f/∂xν
waarbij ν in dit geval de waarden 1 en 2 doorloopt.
Het ‘overstappen’ van het ene grassprietje naar het andere kan ik aangeven met een vector en de
afgeleiden
∂f/∂xν vormen de componenten van die vector.
Deze vector, die in dit geval het glooien van de groene deken beschrijft, heet de
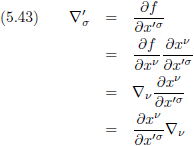
gradiëntvector (of kortweg
gradiënt) en wordt weergegeven met het symbool nabla
 :
:
In een ander stelsel geldt voor
:
En ze zijn in elkaar om te rekenen als volgt:
De
gradiëntvector
is een vector die, net als de
basisvectoren,
als een covariante vector transformeert.
Volgens mij is nu alles wel gezegd over transformaties en het verschil tussen covariant en contravariant,
dus op naar de
volgende paragraaf.































 Naar de uitleg van de volgende paragraaf: paragraaf 6
Naar de uitleg van de volgende paragraaf: paragraaf 6 Naar de uitleg van de vorige paragraaf: inleiding hoofdstuk B
Naar de uitleg van de vorige paragraaf: inleiding hoofdstuk B Overzichtspagina van het artikel
Overzichtspagina van het artikel Overzichtspagina relativiteitstheorie
Overzichtspagina relativiteitstheorie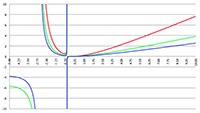 De integraal van
De integraal van De integraal van
De integraal van De integraal van
De integraal van De integraal van
De integraal van De integraal van
De integraal van De integralen van
De integralen van De integralen van
De integralen van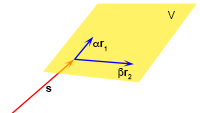 Vectoren, vraagstuk 4
Vectoren, vraagstuk 4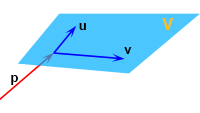 Vectoren, vraagstuk 49
Vectoren, vraagstuk 49 Vectoren, vraagstuk 94
Vectoren, vraagstuk 94 Taylor-reeksen
Taylor-reeksen De Taylor-reeks van
De Taylor-reeks van Een reeks afsplitsen van een functie
Een reeks afsplitsen van een functie De faculteitsfunctie
De faculteitsfunctie Holomorfie van de functie
Holomorfie van de functie Integreren van complexe functies
Integreren van complexe functies Uitleg artikel algemene relativiteitstheorie: paragraaf 13
Uitleg artikel algemene relativiteitstheorie: paragraaf 13 Afleiding van de Schwarzschild-oplossing
Afleiding van de Schwarzschild-oplossing De snelheid van een baksteen die in een zwart gat valt
De snelheid van een baksteen die in een zwart gat valt De stabiliteit van de Lagrange-punten
De stabiliteit van de Lagrange-punten De integraal van
De integraal van De Witte Dag
De Witte Dag De integraal van
De integraal van De cycloïde
De cycloïde De minimale straal van een holle bol
De minimale straal van een holle bol Een planeettijdreismachine
Een planeettijdreismachine De integralen van
De integralen van Gravitationele rood-/blauwverschuiving
Gravitationele rood-/blauwverschuiving Getijdenkrachten
Getijdenkrachten Zijn wij vroeg of laat?
Zijn wij vroeg of laat? Overzichtspagina wiskunde
Overzichtspagina wiskunde Overzichtspagina natuurkunde
Overzichtspagina natuurkunde Overzichtspagina filosofie
Overzichtspagina filosofie Doneer enkele euro’s
Doneer enkele euro’s Wetenschappelijke boeken te koop
Wetenschappelijke boeken te koop Lezingen
Lezingen