Error 404: Not Found

Oeps! En toen was je ineens waar je niet wezen wilde!
Maak je keuze in het menu om vrolijk verder te gaan op deze website.
Excuses voor het ongemak!
Maak je keuze in het menu om vrolijk verder te gaan op deze website.
Excuses voor het ongemak!
 De integraal van
De integraal van De integraal van
De integraal van De integraal van
De integraal van De integraal van
De integraal van Combinaties en manipulaties met nabla
Combinaties en manipulaties met nabla Vectoren, vraagstuk 37
Vectoren, vraagstuk 37 Vectoren, vraagstuk 75
Vectoren, vraagstuk 75 De sommatieconventie van Einstein
De sommatieconventie van Einstein De Taylor-reeks van
De Taylor-reeks van De Taylor-reeksen van
De Taylor-reeksen van De stelling van Green
De stelling van Green Uitleg artikel algemene relativiteitstheorie
Uitleg artikel algemene relativiteitstheorie De vrouw en haar spiegel
De vrouw en haar spiegel De transformatievergelijkingen voor krachten
De transformatievergelijkingen voor krachten Astronomie
Astronomie Vraagstukken elektriciteit en magnetisme
Vraagstukken elektriciteit en magnetisme Wanneer heb je voor het laatst écht iets meegemaakt?
Wanneer heb je voor het laatst écht iets meegemaakt? De illusie van gezond verstand
De illusie van gezond verstand Vertellingen
Vertellingen Once upon a time in the west: Geert Wilders
Once upon a time in the west: Geert Wilders Reacties op lezingen
Reacties op lezingen LaTeX
LaTeX Python code
Python code Kalender van de jaren 0341 − 0350 met weekdagen
Kalender van de jaren 0341 − 0350 met weekdagen Voorbeelden van E = mc2
Voorbeelden van E = mc2 De pijn die je voelt wanneer je in een zwart gat valt
De pijn die je voelt wanneer je in een zwart gat valt De versnelling van een baksteen die in een zwart gat valt
De versnelling van een baksteen die in een zwart gat valt De snelheid van een baksteen die in een zwart gat valt
De snelheid van een baksteen die in een zwart gat valt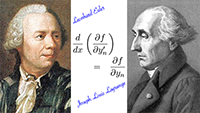 De Euler-Lagrange-vergelijking
De Euler-Lagrange-vergelijking De baan van een baksteen bij een zwart gat
De baan van een baksteen bij een zwart gat De Taylor-reeks van f (x) = tan (ax)
De Taylor-reeks van f (x) = tan (ax) De integralen van f (x) = sin2 x/(1 + a cos x)2
De integralen van f (x) = sin2 x/(1 + a cos x)2 De integraal van f (x) = 1/(x2 (ax2 + bx + c))
De integraal van f (x) = 1/(x2 (ax2 + bx + c)) De invaltijd van een baksteen die in een zwart gat valt
De invaltijd van een baksteen die in een zwart gat valt Naar de overzichtspagina wiskunde
Naar de overzichtspagina wiskunde Naar de overzichtspagina natuurkunde
Naar de overzichtspagina natuurkunde Naar de overzichtspagina filosofie
Naar de overzichtspagina filosofie Doneer enkele euro’s
Doneer enkele euro’s Wetenschappelijke boeken te koop
Wetenschappelijke boeken te koop Lezingen
Lezingen